Image Processing with Comonads
Published on November 27, 2014 under the tag haskell
Introduction
A Comonad is a structure from category theory dual to Monad.
Comonads are well-suited for image processing
– Pretty much everyone on the internet
Whenever Comonads come up, people usually mention the canonical example of evaluating cellular automata. Because many image processing algorithms can be modelled as a cellular automaton, this is also a frequently mentioned example.
However, when I was trying to explain Comonads to a friend recently, I couldn’t find any standalone example of how exactly this applies to image processing, so I decided to illustrate this myself.
I will not attempt to explain Comonads, for that I refer to Gabriel Gonzalez’
excellent blogpost. This blogpost is written in literate Haskell so you should
be able to just load it up in GHCi and play around with it (you can find the raw
.lhs file
here).
{-# LANGUAGE BangPatterns #-}
import qualified Codec.Picture as Juicy
import Control.Applicative ((<$>))
import Data.List (sort)
import Data.Maybe (fromMaybe, maybeToList)
import qualified Data.Vector as V
import qualified Data.Vector.Generic as VG
import Data.Word (Word8)A simple image type
We need a simple type for images. Let’s use the great JuicyPixels library to read and write images. Unfortunately, we cannot use the image type defined in JuicyPixels, since JuicyPixels stores pixels in a Storable-based Vector.
We want to be able to store any kind of pixel value, not just Storable values,
so we declare our own BoxedImage. We will simply store pixels in row-major
order in a boxed Vector.
data BoxedImage a = BoxedImage
{ biWidth :: !Int
, biHeight :: !Int
, biData :: !(V.Vector a)
}Because our BoxedImage allows any kind of pixel value, we get a
straightforward Functor instance:
instance Functor BoxedImage where
fmap f (BoxedImage w h d) = BoxedImage w h (fmap f d)Now, we want to be able to convert from a JuicyPixels image to our own
BoxedImage and back again. In this blogpost, we will only deal with grayscale
images (BoxedImage Word8), since this makes the image processing algorithms
mentioned here a lot easier to understand.
type Pixel = Word8 -- GrayscaleboxImage :: Juicy.Image Juicy.Pixel8 -> BoxedImage Pixel
boxImage image = BoxedImage
{ biWidth = Juicy.imageWidth image
, biHeight = Juicy.imageHeight image
, biData = VG.convert (Juicy.imageData image)
}unboxImage :: BoxedImage Pixel -> Juicy.Image Juicy.Pixel8
unboxImage boxedImage = Juicy.Image
{ Juicy.imageWidth = biWidth boxedImage
, Juicy.imageHeight = biHeight boxedImage
, Juicy.imageData = VG.convert (biData boxedImage)
}With the help of boxImage and unboxImage, we can now call out to the
JuicyPixels library:
readImage :: FilePath -> IO (BoxedImage Pixel)
readImage filePath = do
errOrImage <- Juicy.readImage filePath
case errOrImage of
Right (Juicy.ImageY8 img) -> return (boxImage img)
Right _ ->
error "readImage: unsupported format"
Left err ->
error $ "readImage: could not load image: " ++ errwritePng :: FilePath -> BoxedImage Pixel -> IO ()
writePng filePath = Juicy.writePng filePath . unboxImageFocused images
While we can already write simple image processing algorithms (e.g. tone
mapping) using just the Functor interface, the kind of algorithms we are
interested in today need take a neighbourhood of input pixels in order to
produce a single output pixel.
For this purpose, let us create an additional type that focuses on a specific
location in the image. We typically want to use a smart constructor for this, so
that we don’t allow focusing on an (x, y)-pair outside of the piBoxedImage.
data FocusedImage a = FocusedImage
{ piBoxedImage :: !(BoxedImage a)
, piX :: !Int
, piY :: !Int
}Conversion to and from a BoxedImage is easy:
focus :: BoxedImage a -> FocusedImage a
focus bi
| biWidth bi > 0 && biHeight bi > 0 = FocusedImage bi 0 0
| otherwise =
error "Cannot focus on empty images"unfocus :: FocusedImage a -> BoxedImage a
unfocus (FocusedImage bi _ _) = biAnd the functor instance is straightforward, too:
instance Functor FocusedImage where
fmap f (FocusedImage bi x y) = FocusedImage (fmap f bi) x yNow, we can implement the fabled Comonad class:
class Functor w => Comonad w where
extract :: w a -> a
extend :: (w a -> b) -> w a -> w bThe implementation of extract is straightforward. extend is a little
trickier. If we look at it’s concrete type:
extend :: (FocusedImage a -> b) -> FocusedImage a -> FocusedImage bWe want to convert all pixels in the image, and the conversion function is
supplied as f :: FocusedImage a -> b. In order to apply this to all pixels in
the image, we must thus create a FocusedImage for every position in the image.
Then, we can simply pass this to f which gives us the result at that position.
instance Comonad FocusedImage where
extract (FocusedImage bi x y) =
biData bi V.! (y * biWidth bi + x)
extend f (FocusedImage bi@(BoxedImage w h _) x y) = FocusedImage
(BoxedImage w h $ V.generate (w * h) $ \i ->
let (y', x') = i `divMod` w
in f (FocusedImage bi x' y'))
x yProving that this instance adheres to the Comonad laws is a bit tedious but not that hard if you make some assumptions such as:
V.generate (V.length v) (\i -> v V.! i) = vWe’re almost done with our mini-framework. One thing that remains is that we want to be able to look around in a pixel’s neighbourhood easily. In order to do this, we create this function which shifts the focus by a given pair of coordinates:
neighbour :: Int -> Int -> FocusedImage a -> Maybe (FocusedImage a)
neighbour dx dy (FocusedImage bi x y)
| outOfBounds = Nothing
| otherwise = Just (FocusedImage bi x' y')
where
x' = x + dx
y' = y + dy
outOfBounds =
x' < 0 || x' >= biWidth bi ||
y' < 0 || y' >= biHeight biMedian filter
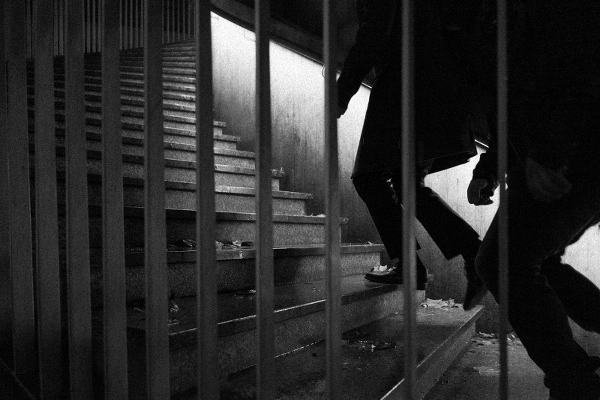
If you have ever taken a photo when it is fairly dark, you will notice that there is typically a lot of noise. We’ll start from this photo which I took a couple of weeks ago, and try to reduce the noise in the image using our Comonad-based mini-framework.
A really easy noise reduction algorithm is one that looks at a local
neighbourhood of a pixel, and replaces that pixel by the median of all the pixels
in the neighbourhood. This can be easily implemented using neighbour and
extract:
reduceNoise1 :: FocusedImage Pixel -> Pixel
reduceNoise1 pixel = median
[ extract p
| x <- [-2, -1 .. 2], y <- [-2, -1 .. 2]
, p <- maybeToList (neighbour x y pixel)
]Note how our Comonadic function takes the form of w a -> b. With a little
intuition, we can see how this is the dual of a monadic function, which would be
of type a -> m b.
We used an auxiliary function which simply gives us the median of a list:
median :: Integral a => [a] -> a
median xs
| odd len = sort xs !! (len `div` 2)
| otherwise = case drop (len `div` 2 - 1) (sort xs) of
(x : y : _) -> x `div` 2 + y `div` 2
_ -> error "median: empty list"
where
!len = length xsSo reduceNoise1 is a function which takes a pixel in the context of its
neighbours, and returns a new pixel. We can use extend to apply this comonadic
action to an entire image:
extend reduceNoise1 :: FocusedImage Pixel -> FocusedImage Pixel
Running this algorithm on our original picture already gives an interesting result, and the noise has definitely been reduced. However, you will notice that it has this watercolour-like look, which is not what we want.
Blur filter
A more complicated noise-reduction filter uses a blur effect first. We can implement a blur by replacing each pixel by a weighted sum of its neighbouring pixels. At the edges, we just keep the pixels as-is.
This function implements the simple blurring kernel:

blur :: FocusedImage Pixel -> Pixel
blur pixel = fromMaybe (extract pixel) $ do
let self = fromIntegral (extract pixel) :: Int
topLeft <- extractNeighbour (-1) (-1)
top <- extractNeighbour 0 (-1)
topRight <- extractNeighbour 1 (-1)
right <- extractNeighbour 1 0
bottomRight <- extractNeighbour 1 1
bottom <- extractNeighbour 0 1
bottomLeft <- extractNeighbour (-1) 1
left <- extractNeighbour (-1) 0
return $ fromIntegral $ (`div` 16) $
self * 4 +
top * 2 + right * 2 + bottom * 2 + left * 2 +
topLeft + topRight + bottomRight + bottomLeft
where
extractNeighbour :: Int -> Int -> Maybe Int
extractNeighbour x y = fromIntegral . extract <$> neighbour x y pixelThe result is the following image:

This image contains less noise, but as we expected, it is blurry. This is not unfixable though: if we subtract the blurred picture from the original picture, we get the edges:

If we apply a high-pass filter here, i.e., we drop all edges below a certain threshold, such that we only retain the “most significant” edges, we get something like:

While there is still some noise, we can see that it’s clearly been reduced. If we now add this to the blurred image, we get our noise-reduced image number #2. The noise is not reduced as much as in the first image, but we managed to keep more texture in the image (and not make it look like a watercolour).

Our second noise reduction algorithm is thus:
reduceNoise2 :: FocusedImage Pixel -> Pixel
reduceNoise2 pixel =
let !original = extract pixel
!blurred = blur pixel
!edge = fromIntegral original - fromIntegral blurred :: Int
!threshold = if edge < 7 && edge > (-7) then 0 else edge
in fromIntegral $ fromIntegral blurred + thresholdWe can already see how the Comonad pattern lets us combine extract and blur,
and simple arithmetic to achieve powerful results.
A hybrid algorithm
That we are able to compose these functions easily is even more apparent if we
try to build a hybrid filter, which uses a weighted sum of the original,
reduceNoise1, and reduceNoise2.
reduceNoise3 :: FocusedImage Pixel -> Pixel
reduceNoise3 pixel =
let !original = extract pixel
!reduced1 = reduceNoise1 pixel
!reduced2 = reduceNoise2 pixel
in (original `div` 4) + (reduced1 `div` 4) + (reduced2 `div` 2)The noise here has been reduced significantly, while not making the image look like a watercolour. Success!

Here is our main function which ties everything up:
main :: IO ()
main = do
image <- readImage filePath
writePng "images/2014-11-27-stairs-reduce-noise-01.png" $
unfocus $ extend reduceNoise1 $ focus image
writePng "images/2014-11-27-stairs-reduce-noise-02.png" $
unfocus $ extend reduceNoise2 $ focus image
writePng "images/2014-11-27-stairs-reduce-noise-03.png" $
unfocus $ extend reduceNoise3 $ focus image
where
filePath = "images/2014-11-27-stairs-original.png"And here is a 300% crop which should show the difference between the original
(left) and the result of reduceNoise3 (right) better:

Conclusion
I hope this example has given some intuition as to how Comonads can be used in
real-world scenarios. For me, what made the click was realising how w a -> b
for Comonad relates to a -> m b for Monad, and how these types of functions
naturally compose well.
Additionally, I hope this blogpost provided some insight the image processing algorithms as well, which I also think is an interesting field.
Thanks to Alex Sayers for proofreading!